Группа специалистов из Шэньянского института автоматизации Китайской академии наук разработала мягкого робота в форме рыбы, способного менять режимы плавания в зависимости от условий среды.
Ключевая особенность новой разработки — интеграция систем движения, восприятия и управления в едином устройстве.
Робот может сочетать четыре различных режима плавания, что выгодно отличает его от существующих аналогов.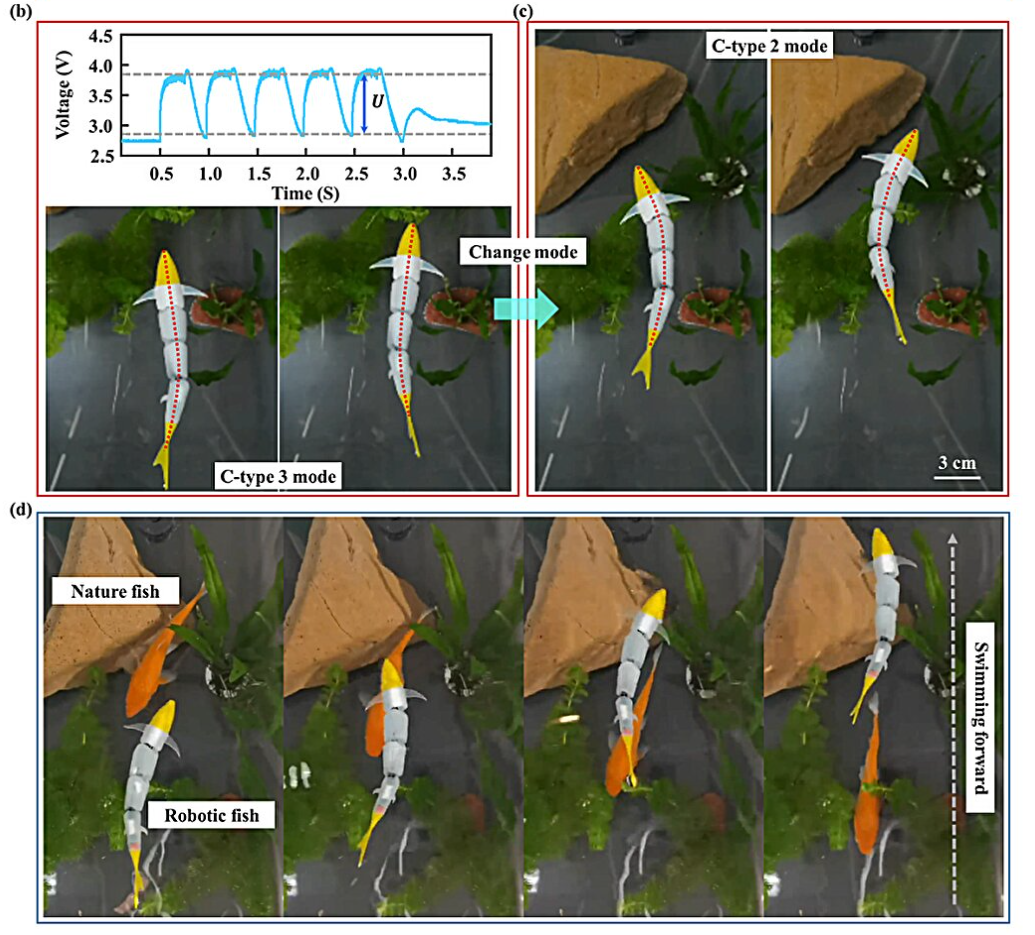
В основе конструкции лежит бионический подход. Инженеры воспроизвели структуру скумбрии, используя технологию 3D-печати для создания гибкого каркаса в сочетании с мягким приводом. Последний состоит из трёх функциональных слоёв: пружин сжатия, диэлектрических эластомерных мембран и гибких электродов.
Для восприятия изменений в окружающей среде, разработчики применили высокоточные гибкие датчики деформации. Эти сенсоры позволяют роботу определять своё положение в воде и параметры окружающей …
Свежие комментарии